
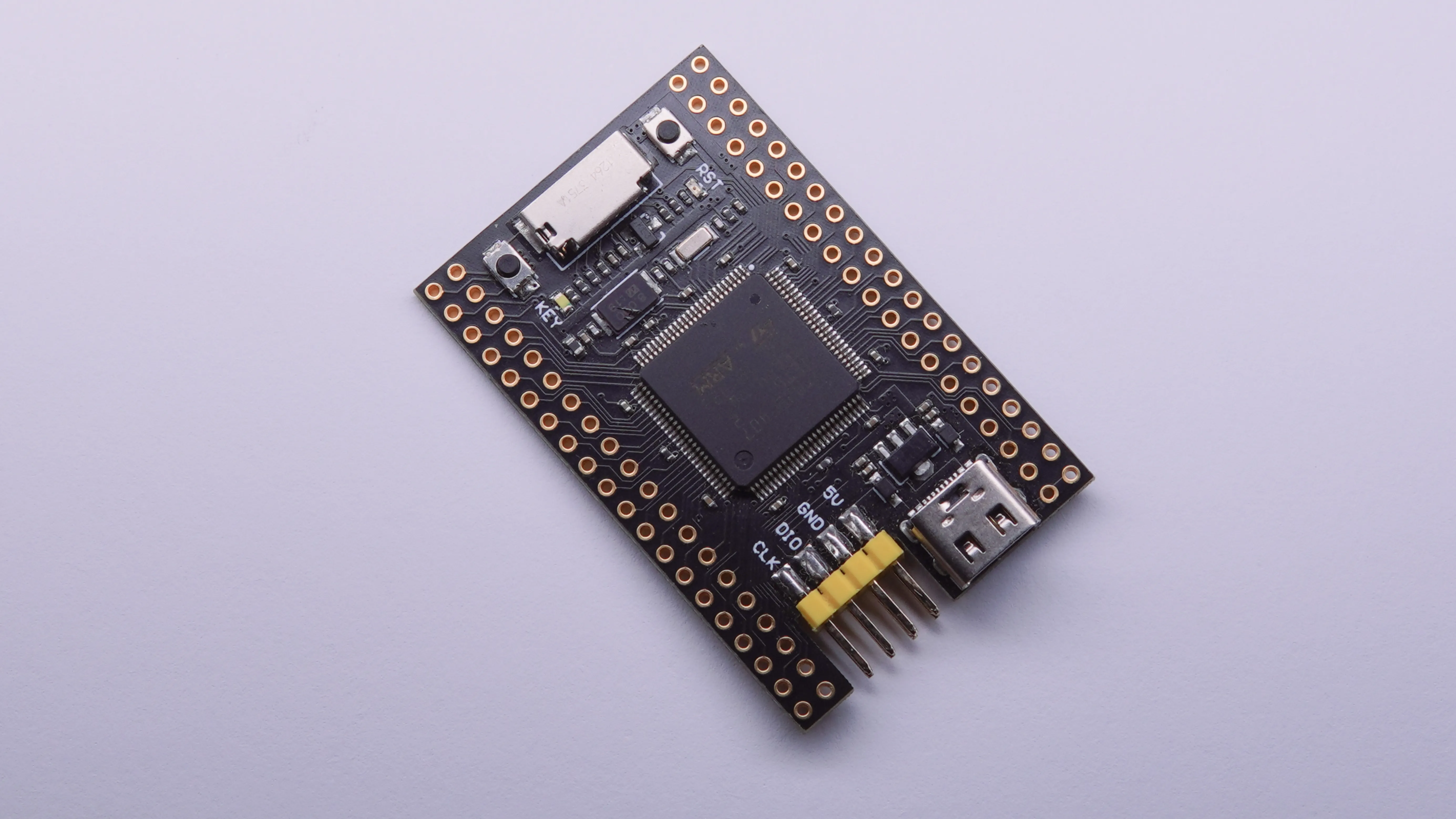
Мікроконтролер STM32 на платі розробника Що таке мікроконтролер? #
Уявіть собі крихітний мозок, здатний керувати навколишнім світом. Формально, мікроконтролер (MCU) — це компактна інтегральна схема, призначена для керування електронними пристроями. Це не просто процесор; це цілий комп’ютер на одному чіпі.
Його основна функція — отримувати дані від навколишнього середовища (за допомогою різних сенсорів), обробляти їх за запрограмованим алгоритмом і виконувати дії: вмикати двигуни, світлодіоди, приймати та відправляти інформацію та відображати її на екрані тощо. На відміну від домашнього ПК, який виконує загальні задачі, мікроконтролер заточений під виконання однієї конкретної задачі дуже ефективно та автономно.
Внутрішня структура мікроконтролера
Всередині крихітного корпусу мікроконтролера міститься цілий комплект:
- Центральний процесор (CPU): Виконує інструкції вашої програми.
- Пам’ять (RAM та Flash): Оперативна пам’ять для тимчасових даних і постійна пам’ять для зберігання коду.
- Периферійні пристрої: Справжня «суперсила» MCU. Це порти вводу/виводу (GPIO), таймери, аналого-цифрові перетворювачі (ADC), інтерфейси зв’язку як I2C, SPI, UART.
Саме наявність усіх цих компонентів на одному чіпі робить мікроконтролер незалежним, енергоощадним і дешевим рішенням для вбудованих систем.
Серце більшості сучасних мікроконтролерів, як-от STM32, базується на архітектурі ARM. Ця архітектура стала стандартом де-факто завдяки ідеальному балансу продуктивності та енергоефективності.
Де ми зустрічаємо мікроконтролери у повсякденному житті? #
Вони навколо нас. Мікроконтролери — це невидимі герої сучасної технологічної революції, які роблять пристрої «розумними». Їхні застосування практично нескінченні:
- Побутова електроніка: Ваша мультиварка, яка підтримує точну температуру, пральна машина з десятком програм, пульт дистанційного керування та навіть зубна щітка з таймером.
- Автомобілі: Сучасний автомобіль може містити сотні мікроконтролерів. Вони керують двигуном (ECU), антиблокувальною гальмівною системою (ABS), подушками безпеки, клімат-контролем, навігаційною системою, тощо.
- Промисловість: Керування конвеєрними лініями, роботами-маніпуляторами, моніторинг тиску та температури в технологічних процесах.
- Дрони: керування двигунами, стабілізація польоту (польотний контролер), обробка даних з GPS та сенсорів, радіокерування
Якщо пристрій має кнопку, дисплей або взаємодіє з фізичним світом — велика ймовірність, що всередині працює мікроконтролер.
Чим мікроконтролер відрізняється від мікропроцесора? #
Це ключове питання, яке часто спричиняє плутанину. Хоча обидва терміни звучать схоже, вони виконують різні ролі.
Мікропроцесор (CPU) — це лише мозок. Це потужний процесор, як той же Intel Core i7 у ноутбуці, але для роботи йому потрібні зовнішні компоненти: окрема оперативна пам’ять (RAM), постійна пам’ять (SSD/HDD), відеокарта та інші периферійні пристрої, підключені через материнську плату. Він призначений для загальних обчислень і роботи зі складним програмним забезпеченням у багатозадачному та багатокористувацькому середовищі.
Мікроконтролер — це не лише мозок, а цілий організм. Він інтегрує на одному чіпі і процесор, і пам’ять, і периферію. Його сила не в сирій потужності, а в спеціалізації та автономності.
Ось головні відмінності:
| Аспект | Мікроконтролер (MCU) | Мікропроцесор (CPU) |
|---|---|---|
| Архітектура | «Система на чипі» (SoC). Все в одному. | Лише центральний процесор. Потребує зовнішніх компонентів. |
| Призначення | Контроль і керування. Виконує одну конкретну задачу. | Загальні обчислення. Запускає складні ОС та програми. |
| Споживання енергії | Дуже низьке. Може працювати від батарейки роками. | Високе. Потребує активного охолодження. |
| Вартість | Дуже низька (від десятків центів до кількох доларів). | Відносно висока. |
| Приклад | STM32, що керує двигуном штори або температурою холодильника. | Intel Core i7, що працює у ноутбуці з ОС Windows. |
Простою аналогією буде порівняння спеціаліста-нейрохірурга (мікроконтролер), який ідеально виконує одну операцію, з універсальним вченим-дослідником (мікропроцесор), який може вирішувати різноманітні складні задачі, але потребує цілої лабораторії (материнської плати) для роботи.
ARM Cortex-M architecture #
Для світу мікроконтролерів компанія ARM запропонувала архітектуру Cortex-M, що не просто домінує на ринку, а й задає стандарти енергоефективності, продуктивності та доступності.
Серія Cortex-M була спеціально спроєктована для застосувань, де критично важливими є низьке споживання енергії, детермінована робота в реальному часі та низька собівартість. На відміну від своїх «старших братів» (Cortex-A, що працює у вашому смартфоні), ці ядра не мають повноцінного блоку управління пам’яттю (MMU), проте часто оснащені блоками захисту пам’яті (MPU), що робить їх ідеальними для детермінованих операційних систем реального часу (RTOS) або навіть для програмування «на голому залізі» (bare-metal).
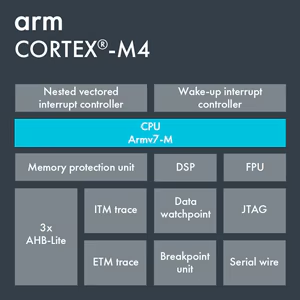
Архітектура ARM Cortex-M
Перше ядро сімейства, Cortex-M3, було анонсоване в 2004 році. Воно кардинально відрізнялося від попередніх ARM-архітектур тим, що було орієнтоване виключно на 32-бітні операції та використовувало архітектуру наборів команд Thumb-2, що забезпечило високу щільність коду та ефективність.
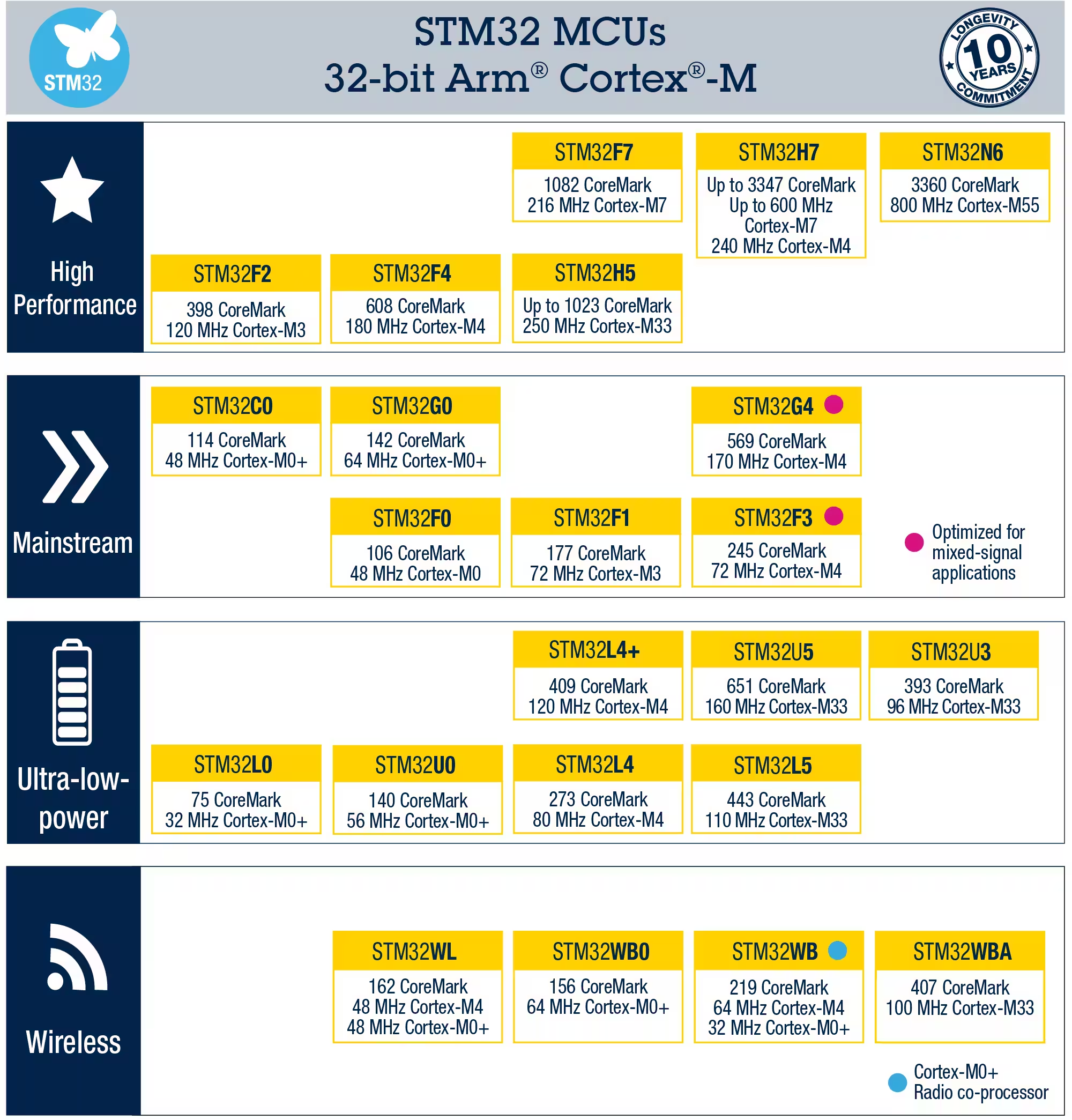
Сьогодні сімейство Cortex-M — це ціла лінійка: від надпотужного Cortex-M85 до енергоефективного Cortex-M0+. Саме на цій архітектурі побудована серія STM32 від STMicroelectronics.
Однією з ключових переваг архітектури є її масштабованість. Наприклад, код, написаний для STM32L0 (на базі Cortex-M0+), може бути з мінімальними змінами перенесений на потужніший STM32F4 (Cortex-M4), що значно прискорює розробку та дає гнучкість при проєктуванні пристрою
STM32 series by STMicroelectronics #
Сімейство STM32 — це справжній хіт серед 32-бітних мікроконтролерів на архітектурі ARM Cortex-M. Воно нагадує величезну модульну систему: починаючи від крихітних чипів з мінімальним енергоспоживанням для носимих пристроїв і закінчуючи потужними процесорами з підтримкою ядра Cortex-M7 для складних обчислень у промисловості.
Перше сімейство STM32 було представлено у 2007 році, і з того часу STMicroelectronics випустила понад 20 серій цих мікроконтролерів, що охоплюють різні рівні продуктивності та енергоефективності.
Кожен мікроконтролер STM32 має унікальну маркування, яка розкриває його характеристики. Наприклад, STM32F103C8T6: «F1» означає серію Mainstream, «03» — конкретну лінійку з відповідним набором блоків периферії, «C» — 48 пінів, «8» — 64 КБ флеш-пам’яті, «T» — корпус LQFP, а «6» — діапазон робочих температур (-40..+85).
Через свою популярність, STM32-мікроконтролери інколи стають жертвами контрафакту. GD32, HC32, AT32, N32, APM32, CW32, MM32, LKS32, HK32, CS32 та ES32 — китайські аналоги, що часто маркують під STM32 для кращих продажів.
А як щодо ESP32? Альтернативні архітектури Xtensa та RISC-V #
- Хоча ARM Cortex-M є беззаперечним лідером на ринку 32-бітних мікроконтролерів, було б помилкою вважати його єдиним гравцем. Яскравим прикладом успішної альтернативи є популярне сімейство ESP32 від китайської компанії Espressif Systems, яке завоювало величезну популярність завдяки інтегрованим Wi-Fi та Bluetooth модулям за дуже низькою ціною.
На відміну від STM32, серце ESP32 б’ється на базі архітектур від інших розробників. 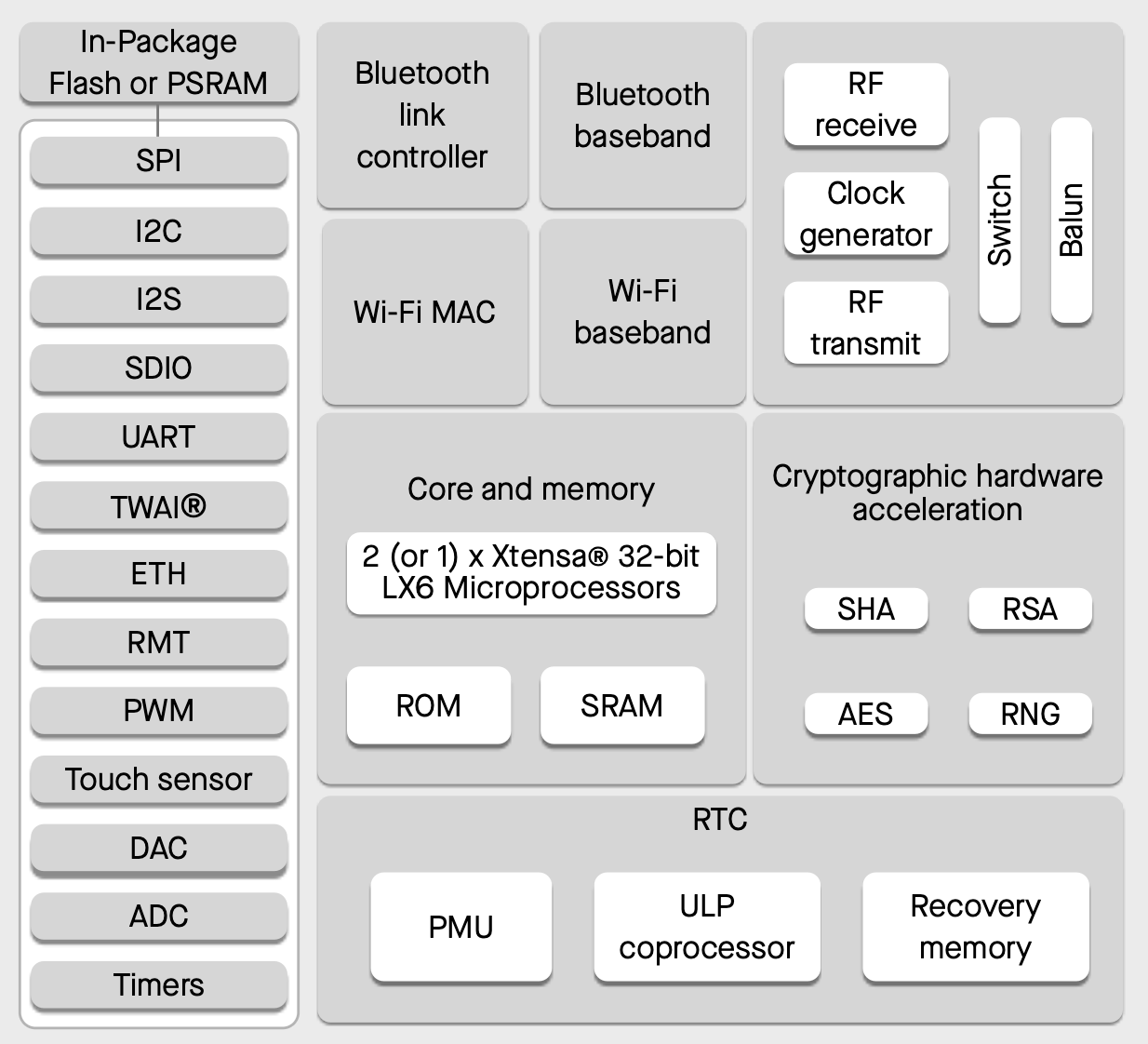
ESP32 Functional Block Diagram - Datasheet
1. Xtensa LX6/LX7 #
Більшість класичних моделей ESP32 (наприклад, ESP32-WROOM-32) використовують потужні 32-бітні ядра Xtensa, розроблені компанією Tensilica (яка зараз є частиною Cadence).
Головна особливість цієї архітектури — її конфігурованість.
Виробник чіпа може додавати до ядра власні кастомні інструкції для прискорення специфічних задач, таких як цифрова обробка сигналів або шифрування. У випадку ESP32, двоядерна архітектура Xtensa LX6/LX7 чудово справляється з одночасною роботою Wi-Fi/Bluetooth стека та коду користувача.
2. RISC-V #
RISC-V — (вимовляється як «ріск-файв» або «риск-фа́йв». Це читання англійською мовою, де перша частина звучить як “risk” (ризик), а друга як “five” (п’ять), що вказує на п’яту ітерацію цієї архітектури наборів команд) це відносно нова, але надзвичайно перспективна архітектура, головною перевагою якої є її відкритість. Це відкритий стандарт, що не належить жодній компанії і не потребує ліцензійних відрахувань.
Це робить його дуже привабливим для виробників, які хочуть уникнути залежності від ARM.
Espressif активно впроваджує RISC-V у своїх нових чіпах:
- Як співпроцесор: В деяких моделях (напр., ESP32-S2/S3) крихітне ядро RISC-V використовується як співпроцесор з наднизьким енергоспоживанням (Ultra-Low Power, ULP). Поки основні ядра Xtensa «сплять», воно може моніторити датчики та «пробудити» систему, коли це необхідно.
- Як основне ядро: У нових бюджетних серіях (напр., ESP32-C3, ESP32-C6) Espressif повністю перейшла на RISC-V, доводячи, що ця архітектура готова до використання у масових продуктах.
| Аспект | ARM Cortex-M (напр., STM32) | Xtensa LX (напр., ESP32) | RISC-V (напр., ESP32-C3) |
|---|---|---|---|
| Модель ліцензування | Пропрієтарна (комерційна) | Пропрієтарна (комерційна) | Відкритий стандарт (безкоштовна) |
| Ключова перевага | Величезна екосистема, стандарт | Висока продуктивність, конфігурованість | Гнучкість, відсутність роялті, модульність |
| Типове застосування | Загальноцільові МК, промисловість | IoT-пристрої з Wi-Fi/BT | Від ULP-задач до високопродуктивних систем |
| Підтримка виробником | Максимальна (ST, NXP, TI та ін.) | Сильна, але сфокусована (Espressif) | Швидко зростає (Espressif, SiFive та ін.) |
Ключовий висновок: Вибір архітектури — це стратегічне рішення для виробника мікросхем. ARM пропонує надійність і величезну екосистему. Xtensa дає високу продуктивність для специфічних задач. А RISC-V надає безпрецедентну свободу та гнучкість, що стимулює інновації та конкуренцію на ринку.
Для розробника це означає більше вибору та кращі інструменти для вирішення своїх завдань.
Integrated Development Environments (IDEs) #
Уявіть, що ви майстер, який збирає складний механізм. У вас є всі деталі — мікроконтролер, датчики, світлодіоди — але без правильно організованого робочого простору та зручних інструментів, процес перетворюється на хаос. Саме для цього існують Integrated Development Environments (IDE) — це ваш віртуальний верстак, де ви пишете код, компілюєте його, налагоджуєте та завантажуєте на плату.
Термін «IDE» вперше з’явився у 1980-х роках разом із Turbo Pascal, який поєднував редактор, компілятор і налагоджувач в одному продукті. Сьогодні сучасні IDE для мікроконтролерів успадкували ці принципи, але значно їх розширили.
Робочий процес для STM32: STM32CubeIDE #
STM32CubeIDE — це офіційне середовище від STMicroelectronics для їх сімейства STM32. Воно поєднує в собі зручний редактор на основі Eclipse, потужний компілятор GCC та унікальний інструмент STM32CubeMX для візуального конфігурування периферії мікроконтролера. Доступно на офіційному сайті після безкоштовної реєстрації
За допомогою STM32CubeMX ви можете просто клацнути на потрібний пін у графічному інтерфейсі, призначити йому функцію (наприклад, UART для зв’язку), і IDE автоматично згенерує відповідний код ініціалізації на C. Це значно прискорює та спрощує початкове налаштування проєкту.
Робочий процес у IDE для мікроконтролерів слідує логічному циклу, який ви будете повторювати знову і знову.
Створення проекту: Ви зазвичай починаєте з вибору типу проекту. У STM32CubeIDE ви можете створити проект з нуля або згенерувати його за допомогою CubeMX.
Конфігурування апаратури: Це ключовий етап. У STM32CubeIDE ви відкриваєте файл
.ioc, де графічно налаштовуєте тактування, піни, периферію (UART, I2C, SPI).Написання коду: Ви пишете свою логіку програми в файлах проєкту (наприклад,
main.c).#include "stm32f4xx_hal.h" int main(void) { HAL_Init(); __HAL_RCC_GPIOA_CLK_ENABLE(); GPIO_InitTypeDef GPIO_InitStruct = {0}; GPIO_InitStruct.Pin = GPIO_PIN_5; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); while (1) { HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5); HAL_Delay(1000); } }Збірка проекту (Build): Натискання кнопки «Build» компілює ваш вихідний код у двійковий файл.
Завантаження та налагодження: Після успішної збірки ви натискаєте «Debug» або «Run». IDE завантажить скомпільовану прошивку на плату через відладчик.
Налагоджувач у STM32CubeIDE дозволяє не лише зупиняти виконання програми, але й «наживо» змінювати значення змінних або периферійних регістрів під час паузи, що неймовірно ефективно для пошуку складних помилок.
Робочий процес для ESP32: підхід на основі фреймворку #
На відміну від інтегрованого підходу ST, екосистема ESP32 історично будувалася навколо фреймворку ESP-IDF (Espressif IoT Development Framework) та інструментів командного рядка. Сучасним стандартом де-факто для розробки стало середовище Visual Studio Code з офіційним розширенням від Espressif.
Робочий процес тут має свою специфіку:
Створення проєкту: Проєкт створюється на основі шаблону за допомогою інструментів ESP-IDF (наприклад, через командний рядок або стартове вікно розширення у VS Code).
Конфігурування проєкту: Замість графічного конфігуратора пінів використовується текстовий конфігуратор
menuconfig. Це потужний інструмент, що запускається в терміналі і дозволяє налаштовувати сотні параметрів: від версії FreeRTOS та розмірів стеків до конфігурації Wi-Fi, драйверів та компонентів вашого проєкту. Налаштування зберігаються у файліsdkconfig.Написання коду: Ви пишете код, використовуючи API, надані фреймворком ESP-IDF. Вони відрізняються від STM32 HAL, але є дуже потужними, особливо для мережевих завдань.
#include "driver/gpio.h" #include "freertos/FreeRTOS.h" #include "freertos/task.h" #define BLINK_GPIO 2 // Пін вбудованого світлодіода на багатьох платах ESP32 void app_main(void) { gpio_reset_pin(BLINK_GPIO); gpio_set_direction(BLINK_GPIO, GPIO_MODE_OUTPUT); while (1) { gpio_set_level(BLINK_GPIO, 0); vTaskDelay(1000 / portTICK_PERIOD_MS); gpio_set_level(BLINK_GPIO, 1); vTaskDelay(1000 / portTICK_PERIOD_MS); } }Збірка та прошивка: У VS Code це робиться натисканням однієї кнопки «Build, Flash and Monitor». На відміну від STM32, для прошивки не потрібен зовнішній програматор типу ST-Link. Більшість плат ESP32 мають вбудований USB-to-UART перетворювач, що дозволяє прошивати їх напряму через USB-кабель.
Моніторинг та налагодження: Найпопулярнішим інструментом для відладки є вбудований серійний монітор, який показує лог-повідомлення з пристрою в реальному часі. Повноцінне апаратне налагодження (з брейкпоінтами) також можливе, але потребує JTAG-адаптера.
Ключова відмінність підходів:
- STM32 (CubeIDE): Візуальний, інтегрований підхід «все в одному». Ви обираєте конфігурацію апаратури, а IDE генерує код ініціалізації.
- ESP32 (ESP-IDF + VS Code): Фреймворк-орієнтований підхід. Ви конфігуруєте проєкт через текстове меню та пишете код, використовуючи готові API фреймворку, що значно прискорює розробку мережевих та IoT-застосунків.
Основні концепції програмування #
Уявіть, що мікроконтролер — це ваша кухня, а програмування — це створення детального рецепту, який змусить її працювати. Найпростіше, програмування — це мистецтво давати чіткі, покрокові інструкції машині, яка розуміє лише мову нулів та одиниць.
Перші програмовані пристрої, такі як жакардовий верстат (1804 р.), використовували для програмування перфокарти — паперові картки з отворами. Ваша програма сьогодні — це надзвичайно швидкий і елегантний цифровий нащадок тієї самої концепції.
Мікроконтролери розмовляють на мові машинного коду, але писати його вручну неймовірно складно. Тому ми використовуємо мови високого рівня, які спеціальна програма — компілятор — перекладає на зрозумілу для заліза мову.
Королева Embedded: Мова C #
C — це беззаперечна королева вбудованих систем. Створена Деннісом Рітчі в Bell Labs на початку 1970-х років, ця мова пережила десятиліття і залишається стандартом де-факто для програмування мікроконтролерів.
Чому саме C?
- Контроль: Вона надає прямий, низькорівневий доступ до апаратного забезпечення: пам’яті, регістрів периферії, переривань. Ви можете «торкнутися заліза» майже безпосередньо.
- Продуктивність: Код на C компілюється в дуже ефективний та швидкий машинний код з мінімальними накладними витратами.
- Портативність: Хоча C дає низькорівневий доступ, її стандартизований синтаксис дозволяє з мінімальними змінами переносити код між різними архітектурами мікроконтролерів.
Проте ця сила вимагає великої відповідальності. У C дуже легко «вистрілити собі в ногу»: допустити витік пам’яті, вийти за межі масиву або створити стан гонитви (race condition) у багатозадачному середовищі. Саме тому в індустрії, де надійність є критичною, використовують спеціальні стандарти кодування.
MISRA C: Кращі практики у світі C для Embedded
Для галузей, де відмова ПЗ може коштувати життя (автомобілі, авіація, медицина), був створений стандарт MISRA C. Це не нова мова, а набір жорстких правил написання коду на стандартній C. Наприклад, він забороняє динамічне виділення пам’яті (
malloc), обмежує використання вказівників та рекурсії, вимагає чіткої типізації. Це робить код більш передбачуваним, безпечним та легшим для аналізу.
Arduino: Революція для початківців #
На початку 2000-х програмування мікроконтролерів було справою ентузіастів та професіоналів, що вимагало значних знань, спеціалізованого обладнання та подекуди доступу до закритої документації виробника. Все змінилося у 2005 році з появою платформи Arduino.
Arduino — це не просто плата чи набір макросів, що приховують код C та C++ від користувача, а й ціла екосистема, яка зробила embedded розробку доступною для всіх. Її успіх базується на трьох китах:
- Простий програмний інтерфейс (API): Замість складних маніпуляцій з регістрами, користувач отримав прості функції, як
digitalWrite(13, HIGH);абоdelay(1000);. - Просте середовище розробки (IDE): Один клік, щоб скомпілювати та завантажити код на плату. Але практично відсутні статичний аналізатор, налегоджувач та подекуди навіть підсвітка синтаксису.
- Відкритість та спільнота: Відкрита апаратна частина та величезна спільнота, що створює тисячі бібліотек та посібників.
«Lego для дорослих»: Чому Arduino не використовують у промисловості?
Незважаючи на свою величезну роль у популяризації, Arduino рідко зустрінеш у комерційних пристроях масового виробництва. Причина в тому, що її простота є водночас і її слабкістю для професійного використання. Високорівневі API приховують деталі роботи заліза, функція
delay()блокує роботу всього мікроконтролера, а стандартні інструменти не надають можливостей для професійного налагодження. Arduino — це ідеальний інструмент для навчання, швидкого прототипування та хобі-проєктів. Але для створення надійного, оптимізованого та масштабованого продукту інженери переходять на професійні інструменти та мови, як-от C.
Нові претенденти: Rust, Python та JS #
Світ не стоїть на місці, і на арену embedded виходять нові мови, кожна зі своїми перевагами.
Rust: Позиціонується як безпечна альтернатива C. Його головна перевага — система володіння (ownership) та запозичень (borrowing), яка гарантує безпеку роботи з пам’яттю ще на етапі компіляції. Це дозволяє писати високопродуктивний низькорівневий код, уникаючи цілого класу помилок, властивих C. Екосистема Rust для embedded стрімко розвивається, але ще не така зріла, як у C.
Python (MicroPython/CircuitPython) та JavaScript (Espruino): Ці інтерпретовані мови принесли у світ мікроконтролерів неймовірну швидкість розробки та простоту. Вони ідеальні для IoT-пристроїв, освітніх проєктів та швидкого прототипування, де продуктивність не є критичною. Однак вони вимагають значно більше ресурсів (Flash/RAM) і не підходять для задач жорсткого реального часу через наявність «збирача сміття» (GC, Garbage Collector) та накладних витрат інтерпретатора.
Щоб систематизувати все сказане, порівняймо ці мови за ключовими критеріями, важливими для вбудованої розробки.
Мови програмування: C, Rust, JS, Python? #
Спробуємо порівняти ключові аспекти вибору мови для embedded в розрізі використання STM32. Більшість висновків справедливі і для ESP32 та інших мікроконтролерів
| Критерій | C (CMSIS/HAL/LL, FreeRTOS) | Rust (no_std, embassy, RTIC) | Python (MicroPython/CircuitPython) | JS (Espruino/JerryScript) |
|---|---|---|---|---|
| Підтримка виробника | Максимальна. Офіційні IDE (CubeIDE), HAL, middleware (USB, TCP/IP, FATFS), DSP-бібліотеки. | Спільнота. Офіційної підтримки ST немає. Якісні PAC/HAL (stm32-rs), фреймворки (embassy, RTIC). | Переважно спільнота/Adafruit. Офіційна підтримка лише для окремих плат (напр., Pyboard). | Неофіційна. Підтримується переважно для власних плат Espruino. |
| Бібліотеки периферії | «В лоб». Офіційні C-драйвери від Bosch, Sensirion, ST та інших. | Драйвери embedded-hal. Офіційні C-бібліотеки потребують FFI (bindgen). | Багато скриптових драйверів (особливо в CircuitPython), але покриття для STM32 нерівномірне. | Менше драйверів. Часто потрібно писати обгортки для периферії вручну. |
| Захист ІВ (IP) | Високий. Нативний код + RDP (Readout Protection) + відключення SWD ускладнюють реверс. | Високий. Аналогічно C: нативний код + RDP. Мова не додає нових вразливостей. | Низький/Середній. Код (.py/.mpy) часто зберігається відкритим на FS. «Заморожування» в прошивку ускладнює, але не рівноцінно нативному коду. | Низький/Середній. Аналогічно Python: скрипти можна витягнути або відновити. |
| Стабільність і RT | Відмінна. Детермінована поведінка, немає GC. Ідеально для жорсткого реального часу. | Відмінна. Без GC, гарантії пам’яті/потокобезпеки. Підходить для жорсткого RT. | Погана. Є GC-паузи та оверхеди інтерпретатора. Не для реального часу. | Погана. Інтерпретатор і GC. Не для реального часу. |
| Можливість зручного налагодження | Найкраща. Повноцінний SWD/JTAG (ST-Link, J-Link), трасування (ITM/SWO/ETM), IDE (Keil, IAR, CubeIDE). | Добра. GDB/OpenOCD/probe-rs, RTT, defmt. Менш «зібрана з коробки» для апаратного дебагу, ніж C. | Інтерактивне. REPL, швидкий цикл змін, print-логування. Немає SWD-дебагу скриптів. | Інтерактивне. Web IDE, консоль. Немає SWD-дебагу скриптів. |
| Розмір бінарника | Мінімальний. Повний стек: десятки-сотні КБ. | Співставний з C. Часто на рівні або на +0-30% від C. З оптимізаціями може бути меншим. | Великий. Інтерпретатор: 200-600 КБ Flash + Heap: десятки-сотні КБ RAM. | Великий. Інтерпретатор: ~100-300+ КБ Flash + помітне споживання RAM. |
| Продуктивність | Максимальна. Прямий доступ до регістрів, FPU, DSP-інструкцій, intrinsics. ≈ 1x (база). | Максимальна. На рівні C (LLVM-backend). Перевірки часто оптимізуються. ≈ 1x. | Дуже низька. Інтерпретована мова. В 10-100 разів повільніше за C. | Дуже низька. Інтерпретована мова. В 10-100 разів повільніше за C. |
| Енергоспоживання | Низьке. Прямий контроль над режимами сну (STOP, Standby). | Низьке. Аналогічно C: прямий контроль над периферією та режимами сну. | Підвищене. Складніше контролювати сон через оверхеди інтерпретатора та GC. | Підвищене. Аналогічно Python: оверхеди інтерпретатора перешкоджають глибокому сну. |
Загальні рекомендації по ресурсах та задачах:
- < 256 КБ Flash, < 64 КБ RAM: Варіанти C або Rust. Python/JS не підходять через великий розмір інтерпретатора
- Жорсткий реальний час (мотор-контроль, DSP, високошвидкісні шини): C або Rust
- М’який реальний час, IoT, керування: Всі варіанти, але для Python/JS слід уникати тайм-критичних операцій
- Швидке прототипування, дитяча освіта, UI: Python (MicroPython/CircuitPython)
Додаткові фактори та компроміси #
| Фактор | Пояснення |
|---|---|
| Підключення вендорських стеків | C: Нативно і без проблем. Rust: Можливо через FFI або crates (менш зріло). Python/JS: Тільки через реалізації спільноти. |
| Зручність розробки | Найшвидший цикл (зміна-виконання): Python/JS (REPL). Середній: C (компіляція-прошивка-дебаг). Складний старт, але чиста архітектура: Rust (cargo, тести). |
| Безпека та сертифікація | C: «Золотий стандарт» для сертифікованих систем (MISRA, ISO 26262), наявні сертифіковані компілятори (Keil, IAR). Rust: Перспективно, але екосистема сертифікації ще формується. Python/JS: Практично не використовуються в сертифікованих системах. |
| Комбінований підхід | Критичне ядро на C/Rust + скриптовий шар (Python/JS) зверху. Можливо на потужних M4 (з запасом Flash/RAM), але ускладнює архітектуру та розробку. |
- Обирайте C, якщо потрібні: офіційні інструменти ST, мінімальний розмір коду, жорсткий реальний час, сертифікація або максимальна продуктивність.
- Обирайте Rust, якщо пріоритетом є безпека пам’яті та потоків, сучасні фреймворки (async/await в embassy), і ви готові інвестувати час у вивчення мови та боротись зі специфічною підтримкою embedded.
- Обирайте Python (MicroPython/CircuitPython), для швидкого прототипування, навчальних проектів або коли є достатньо ресурсів (від 512 КБ Flash) та відсутні жорсткі вимоги до часу виконання.
- Обирайте JS (Espruino), якщо ваша команда має сильну експертизу в JavaScript і потрібна швидка інтерактивність для демо-проєктів, а ресурси плати дозволяють.
Процеси прошивки та налагодження #
Написати код — це лише половина справи. Його потрібно завантажити в мікроконтролер і переконатися, що він працює правильно.
Прошивка (Flashing) — це процес передачі скомпільованого машинного коду з вашого комп’ютера в пам’ять мікроконтролера.
Слово «прошивка» походить від дієслова «прошивати». У буквальному сенсі це означає «проходити наскрізь, з’єднуючи ниткою» (як у вишиванці).
Як це стосується електроніки?
У перших комп’ютерах та станках з ЧПК (чисельно-програмним керуванням) постійна пам’ять (ПЗП, або ROM) будувалася на основі феритових осердь. Це були маленькі магнітні кільця, зібрані у велику матрицю. Програма записувалася вручну прокладанням (фактично, прошиванням) провідників через ті чи інші осердя. Провід, що проходив крізь осердя, означав один біт (наприклад, 1), а той, що огинав його — інший (0).
Для цього вам знадобиться:
- Програматор/налагоджувач: Апаратний пристрій, як-от ST-Link.
- Кабель: Звичайний USB-кабель.
- ПЗ: Ваше середовище розробки (IDE).
- Термін «баг» (жук) у значенні «технічна несправність» популярізувала Ґрейс Гоппер у 1947 році, коли в комп’ютері Harvard Mark II знайшли справжнього метелика, що застряг між контактами реле. Термін «bug» в сенсі технічної помилки вживався, принаймні ще в 1878 Томасом Едісоном, і «debugging», судячи з усього, використовувався як термін в аеронавтиці перед появою комп’ютерів. В Оксфордському словнику слово «debugging» з’явилося ще за два роки, до випадку з комахою — Wikipedia

#GraceHopper has a posse 🙌